Lecture 9
Weighted Graphs
- Each edge has an associated numerical value, called the weight of the edge
- Edge weights may represent, distances, costs, etc.
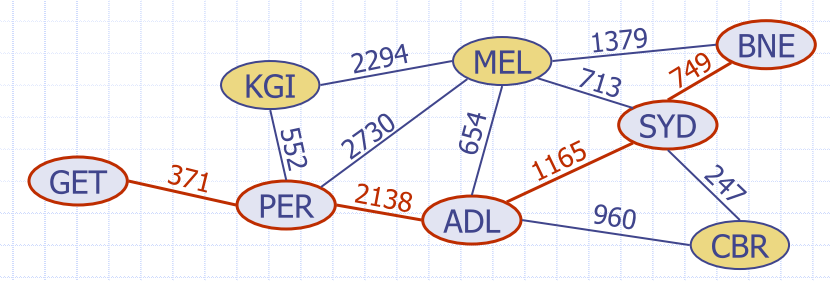
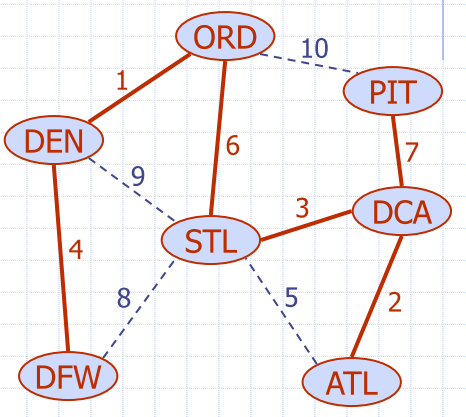
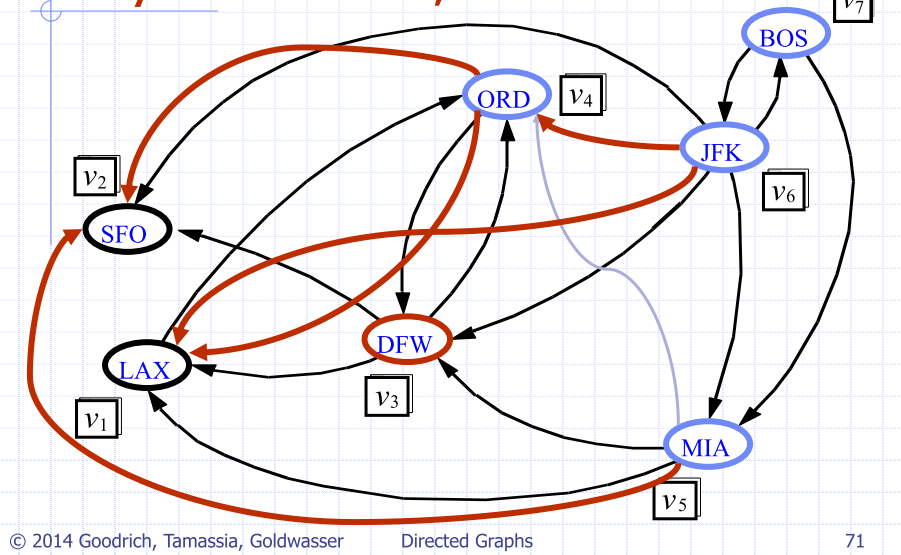
- e.g. flight route graph: weight of an edge represents the distance between the endpoint airports
Shortest Path
- Given a weighted graph and two vertices u and v, find
a path of minimum total weight between u and v
- length of a path is the sum of the weights of its edges
- Example:
- shortest path between Brisbane and Geraldton
If every weight had the same cost
- breadth first search would be the optimal algorithm
Properties
Property 1:
- Subpath of a shortest path is itself a shortest path Property 2:
- There is a tree of shortest paths from a start vertex to
all other vertices
- tree of shortest paths from Brisbane
You could have a single course of shortest path
- E.g. the shortest path from brisbane, to any other airport
Dijkstra's Algorithm
- Distance of a vertex v from a vertex s is the length of the shortest path between s and v
- Dijkstra’s algorithm computes the distances of all the vertices from a given start vertex s
- Assumptions
- graph is connected
- edges are undirected
- edge weights are not negative
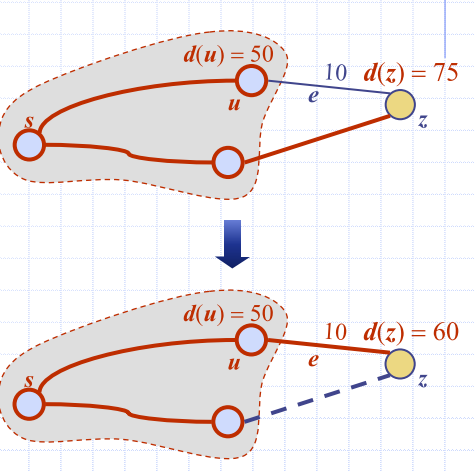
Edge relaxation
- Consider an edge where
- u is the vertex most recently added to the cloud
- z is not in the cloud
- Relaxation of edge e updates distance d(z)
- Updating the label to be the shortest minimum distance

- iterative algorithm to traverse the vertex with the next shortest minimum weight
Dijkstra's Algoithm
- Priority queue stores the vertices outside the cloud
- Key: distance
- Element: vertex
- Locator-based methods
- insert(k, e) returns a locator
- replaceKey(l, k) changes the key of an item
- Store two labels with each vertex
- Distance (d(v) label)
- locator in priority queue
Algorithm DijkstraDistances(G, s):
PQ <-new heap-based priority queue
for all v <- G.vertices()
if v = s
setDistance(v, 0)
else
setDistance(v, (inf))
PQ.insert(getDistance(v), v)
while !PQ.isEmpty()
u <- PQ.removeMin()
for all e in G.incidentEdges(u)
{ relax edge e }
z <- G.opposite(u, e)
r <- getDistance(u) + weight(e)
if r < getDistance(z)
setDistance(z, r)
PQ.replaceKey(getLocator(z), r)
Analysis of Dijkstra's Algorithm
- Graph operations
- find all the incident edges once for each vertex
- Label operations
- set/get the distance and locator labels of vertex
ztimes - setting/getting a label takes O(1) time
- set/get the distance and locator labels of vertex
- Priority queue operations
- each vertex is inserted once into and removed once from the priority queue, where each insertion or removal takes time ( changes total)
- key of a vertex in the priority queue is modified at most
deg(w)times, where each key change takes time (therefore key changes in PQ)
- Dijkstra’s algorithm runs in time
- provided the graph is implemented as an adjacency list/map
- recall that
- can also be expressed as since the graph is connected
recall:
- number of vertices
- number of edges
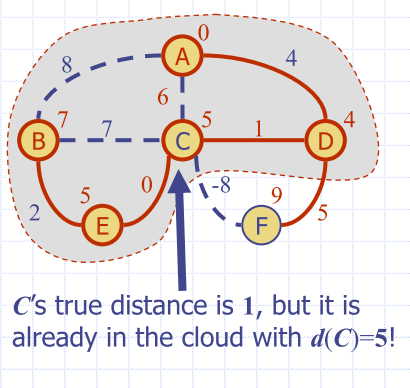
Why it Doesn’t Work for Negative-Weight Edges
Dijkstra’s algorithm is based on the greedy method
- adds vertices by increasing distance
- If a node with a negative incident edge were to be added late to the cloud, it could mess up distances for vertices already in the cloud.
- negative edges are going to 'mess up' distances already inside your cloud
- negative cycle - can keep on going around a cycle and costs keep getting lower and lower
Greedy Algorithm
- This that will benefit you the most, immediately from current point
- best choice you can immediately at one point in time
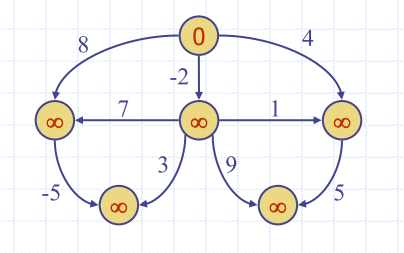
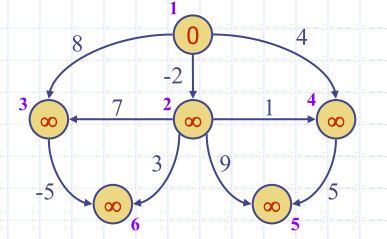
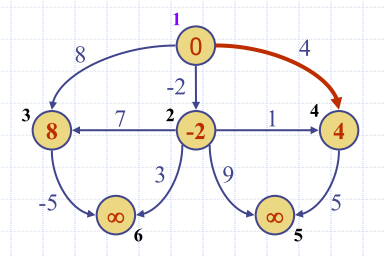
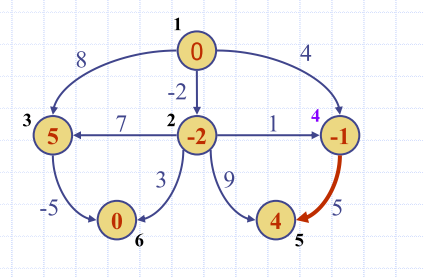
Dijkstra example
- create a table to recount the edges of the shortest path
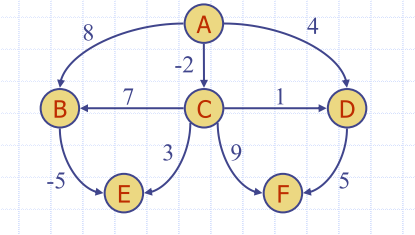
DAG-Based algorithm
- Works even with negative-weight edges
- Uses topological order
- Use topological order to iterate through all vertices, starting with the smallest topological ordering
- Doesn’t use other data structures
- Is much faster than Dijkstra’s algorithm
- Running time
- O(n+m)
Algorithm DagDistances(G, s):
for all v <- G.vertices()
if v = s
setDistance(v, 0)
else
setDistance(v, )
{ Perform a topological sort of the vertices }
for u <- 1 to n do {in topological order}
for each e <- G.outEdges(u)
{ relax edge e }
z <- G.opposite(u, e)
r <- getDistance(u) + weight(e)
if r < getDistance(z)
setDistance(z, r)
| init | Label nodes with initial distances | Topological sort | visit in topological order | result |
|---|---|---|---|---|
 |
 |
 |
 |
 |
Downside of DAG Approach?
- Not all graphs are DAG's
Minimum Spanning trees
- Spanning Subgraph
- subgraph of a graph G containing all vertices of G
- Spanning Tree
- spanning subgraph that is itself a (free) tree
- Minimum Spanning Tree (MST)
- spanning tree of a weighted graph with minimum total edge weight
Aren't MST's = shortest path?
-
We know that single-source shortest path yields a trwee of shortest paths from origin
u -
Can we just run that?
- No
-
Minimum spanning tress might not exactly the same as the shortest path - if the node we're starting from has high weights
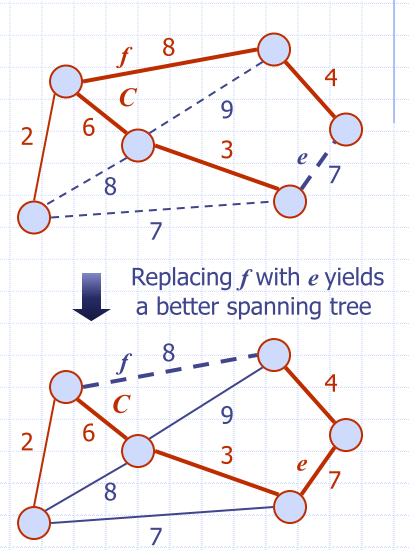
Cycle property
- Let
Tbe a MST of a weighted graphG - Let
ebe an edge ofGthat is not inT - Let
Cbe the cycle formed byewithT - For every edge f of C, weight(f) weight(e)
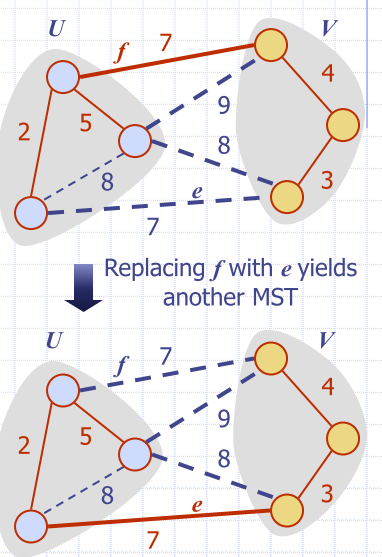
Partition Property
- Consider a partition of the vertices of G into subsets U and V
- Let e be an edge of minimum weight across the partition
- There is a minimum spanning tree of G containing edge e
Proof
- Let T be an MST of G
- If T does not contain e, consider the cycle C formed by e with T and let f be an edge of C across the partition
- By the cycle property, weight(f) weight(e)
- Thus, weight(f) = weight(e)
- We obtain another MST by replacing f with e
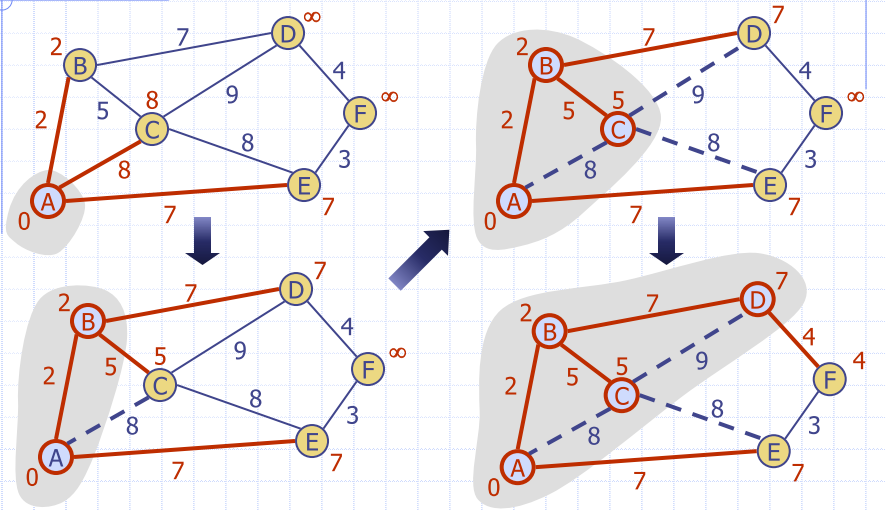
Prim-Jarnik’s Algorithm
- Similar to Dijkstra’s algorithm
- Pick an arbitrary vertex s and grow the MST as a cloud of vertices, starting from s
- Store with each vertex v, a label d(v)
- smallest weight of an edge connecting v to a vertex in the cloud
- At each step
- add to the cloud the vertex u outside the cloud with the smallest distance label
- update the labels of the vertices adjacent to u
KEY DIFFERENCE: Not trying to find the minimum distance, trying to find the minimum spanning tree
Analysis
- Graph operations
- cycle through the incident edges once for each vertex
- Label operations
- set/get distance, parent and locator labels of vertex
zO(deg(z))times - setting/getting a label takes time
- set/get distance, parent and locator labels of vertex
- Priority queue operations
- each vertex is inserted once into and removed once from the priority queue, where each insertion or removal takes time
- key of a vertex w in the priority queue is modified at most
deg(w)times, where each key change takes time
- Prim-Jarnik’s algorithm runs in time
- provided the graph is represented by an adjacency list structure
- recall that
- can also be expressed as O(m log n) since the graph is connected
Recall:
- number of vertices
- number of edges
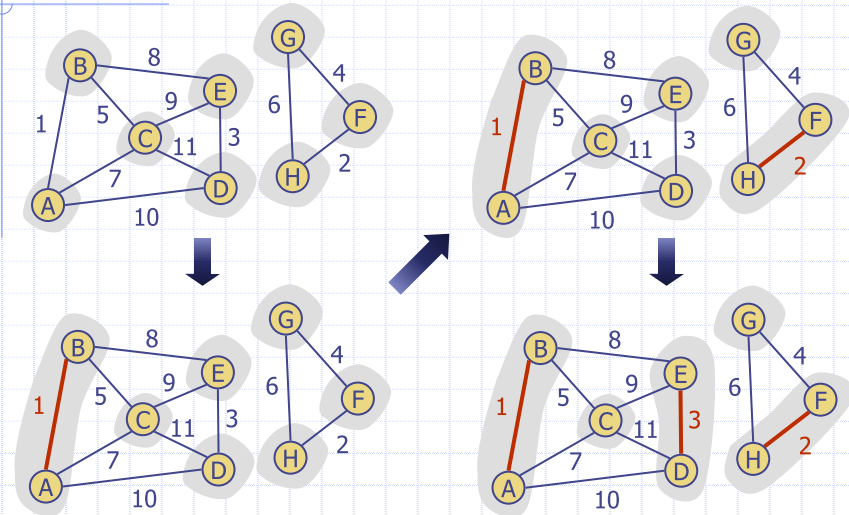
Kruskal's Approach
- Maintain a partition of the vertices into clusters
- initially, single-vertex clusters
- keep an MST for each cluster
- merge “closest” clusters and their MSTs
- Priority queue stores the edges outside clusters
- key: weight
- element: edge
- At the end of the algorithm
- one cluster and one MST
Algorithm Kruskal(G)
Input: a simple connected weighted graph G with n vertices and m edges
Output: a minimum spanning tree T for G
for each vertex v in G do
define an elementary cluster C(v) = {v}
Initialise a priority queue Q to contain all edges in G, using the weights as keys
T -> null {T will ultimately contain the edges of the MST}
while T has fewer than n-1 edges to
(u,v) = value returned by Q.remove_min() (``find``)
Let C(u) be the cluster containing u, and let C(v) be the cluster containing v
if C(u) != C(v) then
add edge (u,v) to T
Merge C(u) and C(v) into one cluster (``union``)
return tree T
Data Structure for Krukal's Approach
- Algorithm maintains a forest of trees
- Priority queue extracts the edges by increasing weight
- An edge is accepted if it connects distinct trees
- Need a data structure that maintains a partition, i.e., a collection of disjoint sets, with operations:
makeSet(u): create a set containing new elementufind(u): return the set storing uunion(A, B): replace sets A and B with their union
List-based partition
- Each set is stored in a sequence
- Each element has a reference back to the set
- find(u) takes time, and returns the set of which u is a member
- Ackuman function (grows far worse than exponential)
- actually grows the inverse of the Ackuman function
- union(A, B) moves the elements of the smaller set to the sequence of the larger set and updates their references
- takes time
- find(u) takes time, and returns the set of which u is a member
- Whenever an element is processed, it goes into a set of size at least double, hence each element is processed at most times
Partition-base implementation
- Partition-based version of Kruskal’s Algorithm
- cluster merges as unions
- cluster locations as finds
- Running time of kruskal's algorithm:
- priority queue operations:
- Is actually but we note that is for a simple graph. Using log laws we get to this result.
- union-find operations:
- each position can be charged at most times, since the size of the cluster's group doubles each time. Occurs max times, therefore,
- priority queue operations:
Solving Graph problems
- Single Pair Reachability:
- Is there a path from to in ?
- Single Pair Shortest Path:
- What is the shortest path (and its cost) from to in ?
- Single Source Shortest Path:
- What is the shortest path (and associated costs) from v to all other u in G?
- All-Pairs Shortest Paths:
- What is the shortest path (and associated costs) between all pairs of vertices in G?
- Each problem is at least as hard as the previous one…
- Use properties of your specific problem to help solve it. Is the graph a DAG? Are the weights always positive? …
Extension Material
NONE OF THIS WILL APPEAR ON THE FINAL EXAM
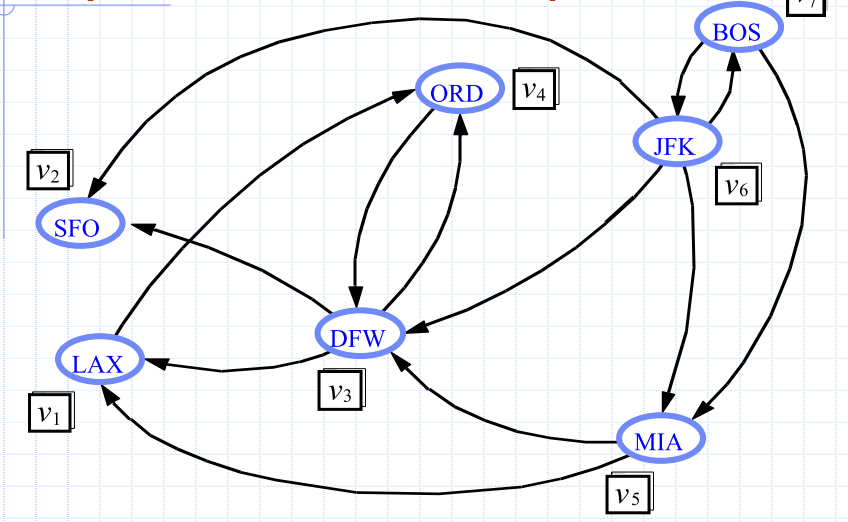
Transitive Closure
- Given a digraph G, the
transitive closure of G is the
digraph G* such that
- G* has the same vertices as G
- if G has a directed path from u to v (u v), G* has a directed edge from u to v
- Transitive closure provides reachability information about a digraph
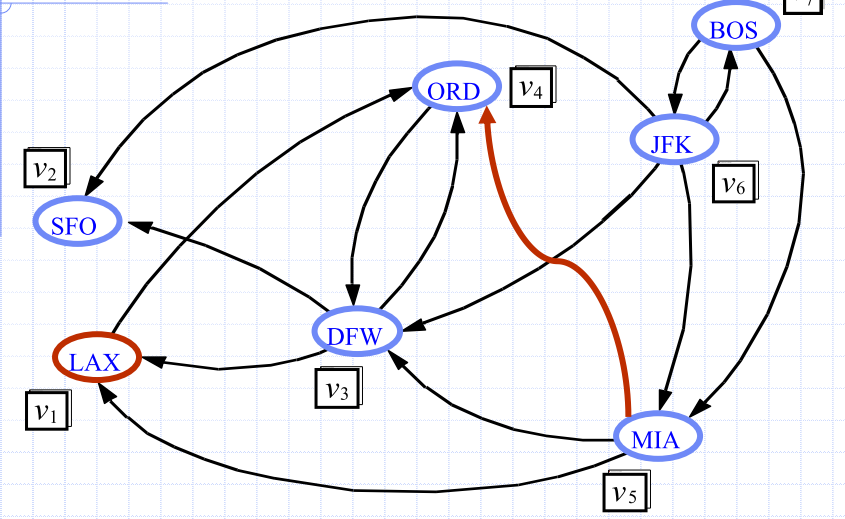
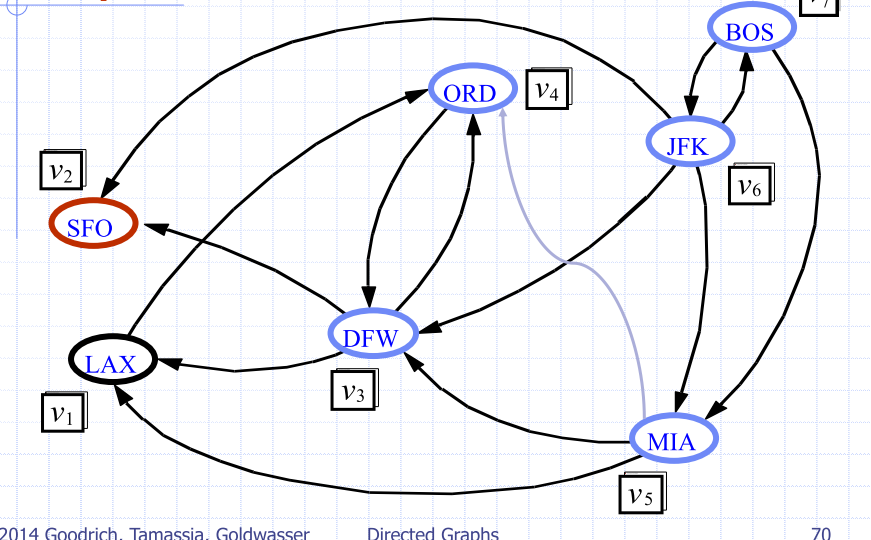
Computing Transitive Closure
- Perform DFS starting
at each vertex
- O(n(n+m))
Dynamic Programming
- Powerful technique for solving problems
- Idea: Break the problem into smaller
subproblems
- Solve the subproblems
- Combine the solutions to solve the full problem
- Reuse subproblem solutions (only compute once, cache the result)
Floyd-Warshall Algorithm
- Number vertices
- Compute Graphs
- has directed edge if has a directed path from to , with intermediate vertices
- In phase , digraph is computed from
- Running time: assuming
areAdjacentis e.g. adjacency matrix
| iteration 0 | iteration 1 | iteration 2 | iteration 3 |
|---|---|---|---|
 |
 |
 |
 |
All pairs shortest paths
-
Floyd-Warshall can also be used to solve the All-Pairs Shortest Path problem
-
Can handle directed, weighted graphs, even where weights are negative!
-
Cannot handle negative cycles a cycle in a graph where the weights summed up is less than 0
-
But it may be modified to detect them
-
Bellman-Ford can detect negative cycles, but solves SSSP, not APSP
-
Johnson’s algorithm can solve APSP in any weighted graph
- Can detect negative cycles
Joels insights:
- Weighted or not?
- Weights positive or not?
- Directed or undirected?
- Simple?
- Self loops or parallel edges?
- Cycles? Negative cycles?